プレスリリース
2025年8月19日
国立研究開発法人国立長寿医療研究センター
国立長寿医療研究センターは、次世代の高齢者支援ロボティクスを社会実装するための実証拠点「リビングラボ」を拡充しました。AI やモーションキャプチャなど先端技術を活用し、誰もが挑戦し続けられる環境の整備と実証研究を推進しています。本取り組みはムーンショット型研究開発事業の一環として行われ、国内外からも高く評価されています。
国立研究開発法人国立長寿医療研究センター(理事長:荒井秀典。以下「当センター」)では、健康長寿支援ロボットセンター・ロボット臨床評価研究室を中心に、次世代の高齢者支援ロボティクスの開発と社会実装を加速するための実証拠点として、2022年に「リビングラボ」を設立しました。このたび、評価対象となるロボットの多様化や、現場からの実証ニーズの高まりを受け、リビングラボの設備と機能を2025年7月より大幅に拡充しました。具体的には、従来の「生活支援実証室」(写真1)に加え、新たに「ロボット実証空間」(写真2)を整備。これにより、より多様な活動や生活場面を支えるロボットの実環境での評価が可能(写真3)となり、高齢者の生活を支える社会実装の取り組みが本格化しています。すでにロボットメーカー、建築メーカー、エンターテイメント事業者、センシングメーカーなど9社を超える共同研究がリビングラボで始動しており、生活支援・医療・介護の現場での活用に向けた産学連携をさらに強化。開発から社会実装までを一貫して支援できる体制を整えました。

写真1:生活支援実証室(従来のリビングラボ空間)の全景
日本では急速な超高齢社会の進展により、IoTセンサーやAI技術を活用したロボットへの期待が高まっています。2050年には、誰もがいつでも、どこでも、ロボットを活用できる「人とロボットが共生する社会」の到来が期待されています。
当センターでは、この未来を見据え、産学官の連携のもとで、ロボットの開発・実証・社会実装を一気通貫で支援できる環境として、リビングラボの機能強化を進めてまいりました。リビングラボは、ロボットやAIを実生活の中で活用し、現場の課題を見つけ、技術で解決していく「共創型の実証空間」です。介護・医療・生活支援の三分野を横断して評価・開発を行う全国でも希少な拠点として、社会課題の解決に貢献しています。
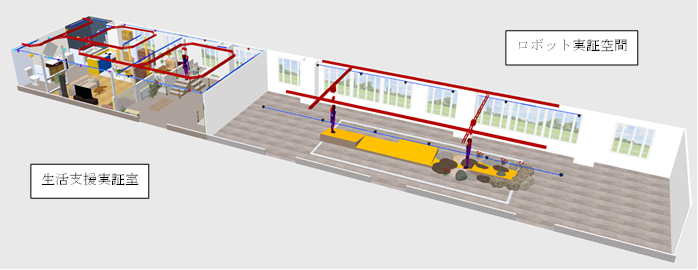
写真2:最新のリビングラボ(生活支援実証室+ロボット実証空間)の全景
拡充にあたっては、人工知能を活用したマーカーレス・モーションキャプチャリングシステムなどの先進的な計測技術を広い空間にも導入しました。これにより、スポーツや芸術に見られるような高度かつ精緻な身体動作をマーカーなしで可視化・分析することが可能となり、次世代ロボティクスの性能評価や、スタートアップ企業の技術検証支援にも活用されています。
また、新たに整備された研究エリアでは、転倒リスクのある高齢者や身体機能に制限のある方でも自由に活動できるよう、直感的に操作可能な電動車いす型ロボット(例:身体動作センシングによる操作支援)など、多様な支援ロボットを配備。誰もが挑戦し続けられる環境の構築を目指しています。
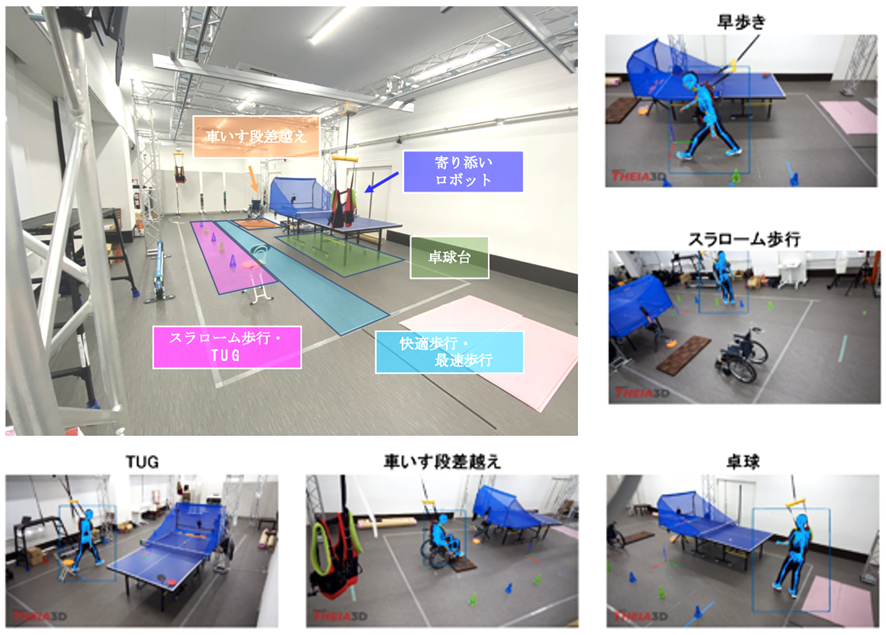
写真3:ロボット実証空間での生活支援ロボットやそれを用いた計測の様子
現在、拡張した研究エリアには、転倒リスクのある高齢者や身体機能に制限のある方々でも、自由に活動できるよう設計されたロボット群を整備しています。たとえば、従来は手でレバー状の操作装置(ジョイスティック)を動かして進行方向や速度を調整する必要がありましたが、現在では身体の動きを感知し、ジョイスティックを使用せずに直感的に操作可能な電動車いす型ロボットも導入しています。これらの技術を活用し、誰もが生涯にわたって挑戦と生きがいをもって活動できる社会の実現を目指した開発・実証研究に取り組んでいます。
なお、本取り組みは、内閣府ムーンショット型研究開発事業「目標3」(プロジェクトマネージャー:平田泰久)における「活力ある社会を創る適応自在AIロボット群」(課題推進者:加藤健治)の一環として実施されています。また、同プロジェクトから発展した取り組みとして、2024年にはパリ・パラリンピック公式ファンゾーンにて「スマーター・インクルーシブ・ダンス」のパフォーマンスを実施し、第11回ロボット大賞 介護・医療・健康分野 優秀賞を受賞するなど、国内外で高く評価されています。

写真4:本リビングラボで導入済の支援ロボットの例
健康長寿支援ロボットセンター ロボット臨床評価研究室
TEL:0562-46-2311 内線6112
Email:clinrob@ncgg.go.jp
国立長寿医療研究センター総務部総務課 総務係長(広報担当)
〒474-8511 愛知県大府市森岡町七丁目430番地
TEL:0562-46-2311(代表)
E-mail:webadmin@ncgg.go.jp
@を全角表示しております。メール送信にあたっては、半角の@に直してお送りください。
![]()



![]()
© National Center for Geriatrics and Gerontology

